PENGONTROL
KECEPATAN DAN ARAH PUTARAN MOTOR BERDASARKAN JARAK RINTANGAN
Gustavi Dwi Cahyo1, Yosa Mega Nerilla2, Samuel BETA3
1Mahasiswa dan 2Dosen Program Studi Teknik Elektronika, Jurusan Teknik Elektro, Politeknik Negeri Semarang Jl. Prof. H. Soedarto, SH, Tembalang, Semarang, Indonesia E-mail : gustavidwicahyo@gmail.com, yosameganerilla@gmail.com |
Intisari -- Untuk mempermudah pengendalian mobil dibutuhkan system keamanan pada
sebuah mobil dalam proses pengamanan dan
system pengereman antara objek dengan
bumper mobil karena itulah dibutuhkan alat atau sebuah system komplek secara
otomatis. untuk melakukan system pengereman dan system keamanan saat parkir ,Maka
dalam proyek ini dibuatlah
aplikasi ARM (Advanced RISC Machine) menggunakan masukan sensor ultrasonik HCSR-04 dan luaran Motor dc ,
Buzzer dan Led Bargraph. Sensor ultrasonik HCSR-04 digunakan untuk mengukur jarak aman
antara bumper alat dengan objek yang berada didepan atau dibelakangnya dengan
jarak antara objek dan alat 50 cm jarak aman serta sebagai input driver motor
untuk proses pengereman . Led Bargraph dan buzzer digunakan untuk indikator dari masukan sensor
ultrasonic tersebut. Driver Motor digunakan untuk mengontrol dan mengatur PWM
(Pulse Width Modulation) pada motor Dc putar kanan dan putar kiri guna untuk
system pengereman pada alat secara otomatis. Sedangkan ARM sebagai kontroler dan pemroses
sinyal.
Kata Kunci
: ARM, Sensor
Ultrasonik HCSR-04,Led Bargraph , Buzzer, Motor DC.
Abstract – To simplify security system controlling the car takes on a car in the process of securing and braking system between objects with bumper cars because that needed a tool or a complex system automatically. to perform the braking system and the security system when parking, so this project was made applications ARM (Advanced RISC Machine) using an ultrasonic sensor inputs and outputs HCSR-04 Motor dc, Buzzer and Led Bargraph. HCSR-04 ultrasonic sensors are used to measure the distance between the bumper tool to secure objects that are in front or behind with a distance between the object and the instrument safe distance of 50 cm as well as motor driver input for the braking process. Led Bargraph and buzzer are used for the indicator of the ultrasonic sensor inputs. Driver Motor used to control and adjust the PWM (Pulse Width Modulation) on the Dc motors turn right and turn left in order for the braking system on the device automatically. While ARM as a controller and signal processing.
Abstract – To simplify security system controlling the car takes on a car in the process of securing and braking system between objects with bumper cars because that needed a tool or a complex system automatically. to perform the braking system and the security system when parking, so this project was made applications ARM (Advanced RISC Machine) using an ultrasonic sensor inputs and outputs HCSR-04 Motor dc, Buzzer and Led Bargraph. HCSR-04 ultrasonic sensors are used to measure the distance between the bumper tool to secure objects that are in front or behind with a distance between the object and the instrument safe distance of 50 cm as well as motor driver input for the braking process. Led Bargraph and buzzer are used for the indicator of the ultrasonic sensor inputs. Driver Motor used to control and adjust the PWM (Pulse Width Modulation) on the Dc motors turn right and turn left in order for the braking system on the device automatically. While ARM as a controller and signal processing.
PENDAHULUAN
1.1
Latar Belakang
Sistem
Keamanan merupakan salah satu system
yang dibutuhkan untuk mengamankan sebuah benda atau alat . kebutuhan akan
system keamanan, harus ada dalam setiap alat yang dimana alat itu mengutamakan
keselamatan penggunanya. Pada saat ini masih banyak alat-alat yang tidak
mengutamakan keselamatan penggunanya , maka dari itu kami di proyek ARM
membuat alat untuk pengontrol kecepatan
dan arah putaran motor berdasarkan jarak rintangan . dalam proyek ini memanfaatkan
input dari sensor jarak untuk di proses guna untuk system keamanan dan system
pengereman pada sebuah mobil anak elektrik. Di zaman yang serba cepat dan zaman
serba otomatis seperti sekarang ini pemanfaatan system keamanan ini sangat dibutuhkan
sekali karena dengan alat-alat yang semakin canggih dan semakin modern .
Kemudian untuk
memudahkan pengaplikasian system ini dengan berbasis ARM untuk memudahkan
penggunanya dalam mengoperasikan setiap alat ( contohnya : dalam mengasuh buah
hati dengan mobil anak elektrik ) tidak perlu khawatir lagi karena Dengan
menggunakan system keamanan otomatis berbasis ARM ini setiap pengguna tidak
perlu lagi untuk gelisah akan keselamatan dalam menggunakan alat atau benda .
1.2 Tujuan
Tujuan
pembuatan alat ini adalah :
1.
Sebagai modul pembelajaran
2.
Sebagai
pengontrol kecepatan dan arah putaran motor berdasarkan jarak rintangan.
1.3 Rumusan Masalah
Berdasarkan latar belakang, akan
ditentukan beberapa rumusan masalah, yaitu :
1.
Bagaimana cara merancang pengontrol kecepatan dan arah
putaran motor menggunakan sensor HC-SR
04?
2.
Bagaimana cara memprogram ARM agar dapat terhubung
dengan sensor HC-SR04 sebagai pengontrol?
3.
Bagaimana
proses pengontrol kecepatan dan arah putaran motor berdasarkan jarak
rintangan menggunakan ARM?
Adapun yang membatasi alat ini adalah :
1.
Bila sensor tidak bisa mendeteksi jarak
rintangan dengan benar.
Target proyek ini menjalankan program yang
dapat diimplementasikan langsung terhadap alat. Langkah - langkah pembuatan Proyek ARM dapat didefinisikan sebagai berikut :
1.
Studi
pustaka alat dan bahan
2.
Perancangan
perangkat lunak dan program
3.
Implementasi
program
4.
Pengujian
perangkat lunak dan perangkat keras
5.
Analisa
6.
Laporan
2. TINJAUAN PUSTAKA
Penjelasan dan uraian teori penunjang yang
digunakan dalam membuat alat ini diperlukan untuk mempermudah pemahaman tentang
cara kerja rangkaian maupun dasar-dasar perencanaan pembuatan alat.
A. Sensor HC-SR04
Gelombang
ultrasonik adalah gelombang dengan besar frekuensi diatas frekuensi gelombang
suara yaitu lebih dari 20 KHz. Seperti telah disebutkan bahwa sensor ultrasonik
terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan
rangkaian penerima ultrasonik yang disebut receiver. Sinyal
ultrasonik yang dibangkitkan akan dipancarkan dari transmitter ultrasonik.
Ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan, dan
diterima oleh receiver ultrasonik. Sinyal yang diterima oleh
rangkaian receiver dikirimkan ke rangkaian mikrokontroler
untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya
(bidang pantul).

Gambar 1. Sensor HC-SR04
Sensor
HC SR-04 merupakan sensor ultrasonik yang dapat digunakan untuk mengatur
kecepatan putaran motor dc berdasarkan jarak rintangan.
B. Motor DC
Motor dc adalah motor listrik yang memerlukan suplai
tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak
mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak
berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus
searah, sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur: Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur: Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan Arus medan – menurunkan arus medan akan meningkatkan kecepatan.

Gambar 2. Motor DC
C. ARM CortexM0
ARM adalah
prosesor dengan arsitektur set instruksi 32bit RISC (Reduced Instruction Set Computer) yang dikembangkan oleh ARM
Holdings. ARM merupakan singkatan dari Advanced
RISC Machine.

Gambar 3. Keluarga Mikroprosesor ARM
Mikroprosesor ARM mempunyai beberapa keluarga
untuk menjangkau berbagai aplikasi, salah satunya adalah ARM Cortex
Prosesor Embedded (ARM Cortex Embedded
Processors). Prosesor-prosesor di keluarga seri CortexM telah
dikembangkan khusus untuk domain mikrokontroler, dimana permintaan untuk
kecepatan, determinasi waktu proses, dan manajemen interrupt bersama dengan
jumlah gate silikon minimum (luas silikon yang minimum menentukan harga akhir
prosesor) dan konsumsi daya yang minimum sangat diminati, seperti ARM
CortexM0 yang merupakan prosesor untuk menggantikan aplikasi
mikrokontroler 8/16bit dengan tipe ARM NUC120
ARM NUC120 merupakan sebuah modul
mikrokontroler 32-bit berbasis ARM CortexM0.
ARM NUC 120 BOARD dilengkapi dengan program bootloader sehingga tidak
membutuhkan divais programmer terpisah. NUC120 dapat beroperasi dengan
kecepatan CPU sampai 48MHz. Telah dilengkapi dengan Full Speed USB 2.0 Device
Controller yang sangat fleksibel dan dapat dikonfigurasi untuk berbagai
aplikasi berbasis USB.

Gambar 4. DT-ARM NUC120RDBN
Spesifikasi :
- Berbasis NUC120RD2BN dengan Flash memory APROM sebesar 64 Kbyte, 8 Kbyte SRAM, 4 Kbyte Data Flash.
- Memiliki kemampuan IAP (In Applicaton Programming) dan ISP (In System Programming) melalui bootloader software pada LDROM.
- Tersedia jalur SWD (Serial Wire Debug) yang dapat digunakan untuk debugging serta programming.
- Dapat diprogram langsung melalui jalur USB.
- Mendukung Peripheral DMA mode.
- Memiliki 8 channel ADC dengan resolusi 12 bit.
- Memiliki 4 buah timer 32 bit.
- Memiliki fungsi Watchdog dan RTC.
- Dilengkapi dengan 4 buah hardware PWM dengan resolusi 16 bit.
- Memiliki masing-masing 2 kanal jalur komunikasi UART, SPI, dan I2C.
- Memiliki 1 channel I2C.
- Tersedia antarmuka USB dan UART RS-485.
- Terdapat sensor suhu built-in dengan range -40 - 125°C dengan resolusi 1°C. Sensor ini memiliki gain -1.76mV/°C dan offset 720 mV pada suhu 0°C.
- Memiliki hingga 45 jalur GPIO yang masing-masing dapat dikonfigurasi pull-up/ pull-down resistor, repeater mode, input inverter, dan open-drain mode.
- Terdapat 22 MHz internal osilator.
- Frekuensi osilator eksternal sebesar 12 MHz dan fitur PLL sampai dengan 48 MHz.
- Frekuensi osilator eksternal sebesar 32.768 KHz yang dapat digunakan untuk fungsi RTC dan Low Power Mode.
- Tersedia rangkaian reset manual.
- Bekerja pada tegangan 3,3 – 5,5 V.
- Dilengkapi dengan regulator 3,3 V dan 5 V dengan arus maksimum 800 mA
- Tersedia pilihan catu daya input : catu daya eksternal 6,5 – 12 VDC (via regulator), catu daya eksternal 3,3 – 5,5 VDC (tanpa melalui regulator), atau menggunakan sumber catu daya dari jalur USB.
D. Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi
untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip
kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari
kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri
arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau
keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan
dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan
diafragma secara bolak-balik sehingga membuat udara bergetar yang akan
menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah
selesai atau terjadi suatu kesalahan pada sebuah alat (alarm)

Gambar 5. Piezo Buzzer
D. Led Bargraph
Pada
proyek Arduino ini, digunakan LED Bargraph sebagai luaran.LED Bargraph adalah
susunan dari beberapa LED (Light Emitting Diode) yang disusun satu baris
dalam satu kemasan khusus. LED bargraph yang digunakan adalah jenis LED
bargraph yang mempunyai 10 segmen, yaitu rangkaian 10 buah LED yang disusun
berurutan dalam sebuah kemasan.
LEDbargraph dihubungkan ke perangkat Arduino, yangdifungsikan sebagai luaran. Ada dua jenis LED bargraph yang digunakan dalam rangkaian variasi LED bargraph ini, yaitu satu buah LED bargraph aktif tinggi dan satu buah LED bargraph aktif rendah. LEDbargraph aktif tinggi akan menyala jika diberi logika rendah ‘1’, dan LEDbargraph akan padam jika diberi logika tinggi ‘0’.LED bargraph aktif rendah akan menyala jika diberi logika rendah ‘0’, dan LED bargraph akan padam jika diberi logika tinggi ‘1’.
LEDbargraph dihubungkan ke perangkat Arduino, yangdifungsikan sebagai luaran. Ada dua jenis LED bargraph yang digunakan dalam rangkaian variasi LED bargraph ini, yaitu satu buah LED bargraph aktif tinggi dan satu buah LED bargraph aktif rendah. LEDbargraph aktif tinggi akan menyala jika diberi logika rendah ‘1’, dan LEDbargraph akan padam jika diberi logika tinggi ‘0’.LED bargraph aktif rendah akan menyala jika diberi logika rendah ‘0’, dan LED bargraph akan padam jika diberi logika tinggi ‘1’.

Gambar 6. LED Bargraph
3. METODE PEMBUATAN ALAT
Perangkat Keras dan Rangkaian Elektronika
Adapun sistem yang digunakan yaitu :
1.
Sensor HC-SR04
2.
Motor DC
3.
Buzzer
4.
LED Bargraph
Blok Diagram Hubungan Komponen Utama
Blok diagram aplikasi ARM menggunakan
masukan sensor jarak dengan
luaran motor dc, buzzer dan led bargraph dapat dilihat pada gambar dibawah ini :

Gambar 7. Blok Diagram Komponen Utama
F. Perangkat Lunak
Untuk diagram
alir, program aplikasi ARM
menggunakan masukan sensor ultrasonic.
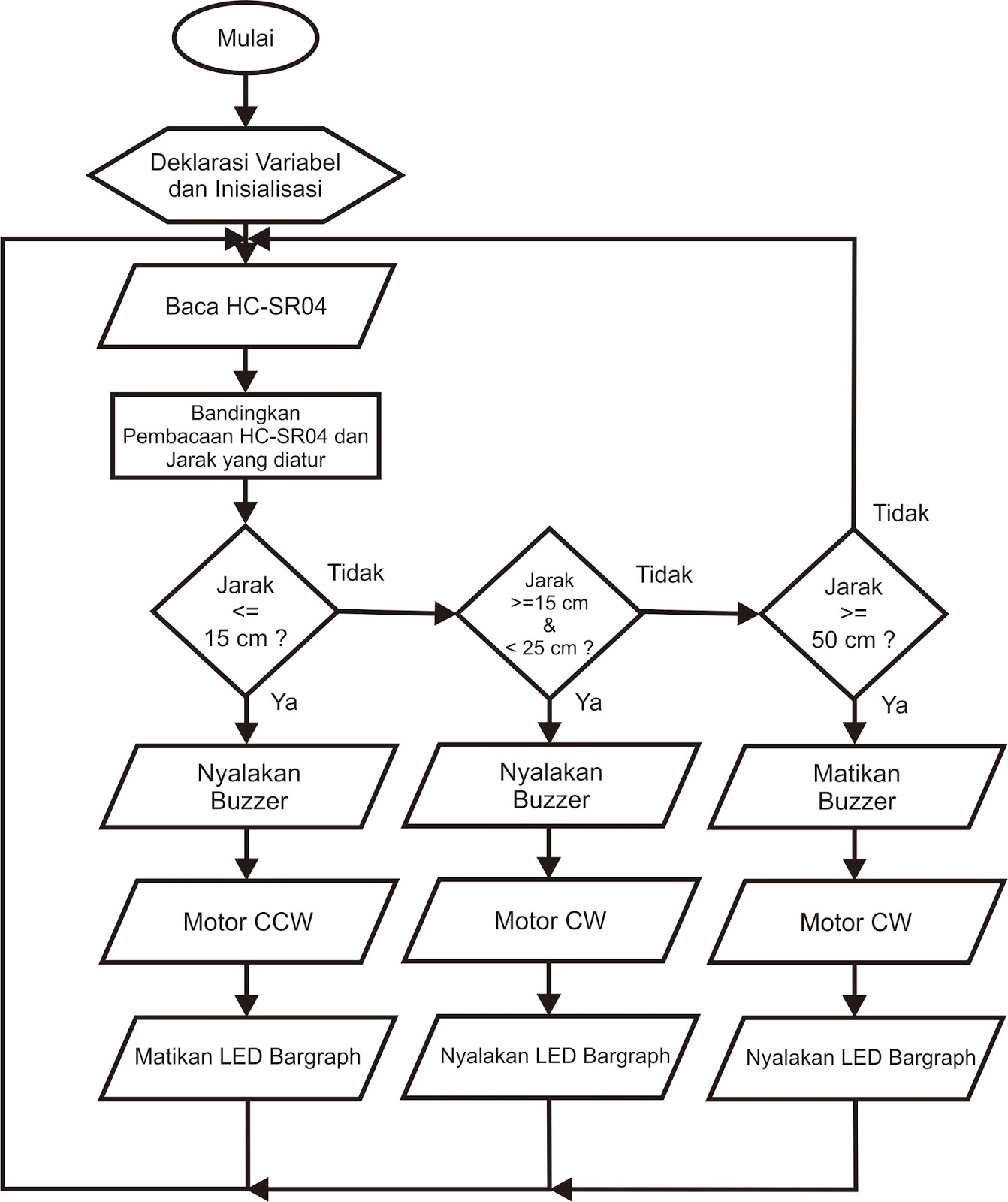
Gambar 8. Diagram Alir
II. Pengujian Alat
A. Pengujian Sensor Ultrasonic HCSR-04
Pengujian ini bertujuan untuk mendapatkan
nilai tegangan output dari sensor jarak yang berupa pulsa kemudian dijadikan dan dikonversi sebagai bit masukan pada
pengkondisian sinyal untuk pengaturan kecepatan motor. Yang menggunakan sensor yang dibuat untuk sistem pengereman
pada pengontrol kecepatan dan arah putaran motor berdasarkan jarak rintangan.
III. KESIMPULAN
Setelah melakukan percobaan,
pengambilan data, dan penganalisaan terhadap data yang telah didapat pada proyek ini, maka didapatkan kesimpulan yaitu sebagai berikut:
1.
ARM dapat memudahkan kita dalam kehidupan sehari-hari
terutama untuk instrumentasi sebagai mikrokontroler yang canggih.
2.
Manfaat sensor ultrasonic banyak sekali, salah satunya
yaitu sebagai sensor pendeteksi jarak dengan menangkap sinyal berbentuk suara
ultrasonik.
3.
Pengontrol kecepatan dan arah putaraan motor berdaarkan
jarak rintangan berbasis ARM ini
memudahkan pengguna alat ini untuk pengaplikasian alat sebagai system
keamanan., dengan menggunakan pengontrol kecepatan dan arah putaran motor
berdasarkan jarak rintangan berbasis ARM ini tidak perlu lagi khawatir lagi
karena alat atau system sudah dilengkapi system pengereman dan system keamanan.
4.
DAFTAR
PUSTAKA
[3]Manual DT-ARM NUC120 Board.pdf
5. BIODATA


Nama penulis: Yosa
Mega Nerilla. Penulis dilahirkan di Semarang, 21 Juli
1996. Penulis telah menempuh
pendidikan formal di SDN Bulusan 01-02, SMPN 27 Semarang, dan SMAN 9 Semarang. Pada tahun 2014 penulis mengikuti seleksi
mahasiswa baru diploma (D3) dan diterima menjadi mahasiswa baru diploma (D3) di
kampus Politeknik Negeri Semarang (Polines) dengan Program Studi D3 Teknik
Elektronika, Jurusan Teknik Elektro. Penulis terdaftar dengan NIM. 3.32.14.1.19. Apabila ada kritik, saran dan pertanyaan
mengenai penelitian ini, bisa menghubungi melalui email: yosameganerilla@gmail.com.
LAMPIRAN :
- Download Laporan ARM Di sini
- Download Datasheet ARM Di sini
- Download Program ARM Di sini atau lihat.pdf di sini
- Download Jurnal ARM Di sini
- Download Pengawatan ARM Di sini
- Download PowerPoint ARM Di sini
- Gambar Rangkaian dalam driver Motor L298N di sini
- Datasheet NUC120xx di sini
- Gambar Rangkaian Alat di sini
Tidak ada komentar:
Posting Komentar
Silahkan Berikan Kritik dan Saran Anda. Karena Kritik dan Saran Anda Akan Sangat Membantu Kami dalam Memperbaiki Diri